IntelligentUAVChampionshipSimulator
自主无人机竞速模拟器使用说明
简介
RMUA2026赛季模拟器
官方测试环境
ros-noetic
ubuntu20.04
NVIDIA RTX3090TI gpu
INTEL I7 12th cpu注意:若使用神经网络,建议使用双显卡以保证模拟器性能
使用说明
1. 安装Nvidia-Docker
确保已安装 Nvidia 驱动
安装docker
sudo apt-get install ca-certificates gnupg lsb-releasesudo mkdir -p /etc/apt/keyringscurl -fsSL https://download.docker.com/linux/ubuntu/gpg | sudo gpg --dearmor -o /etc/apt/keyrings/docker.gpgecho "deb [arch=$(dpkg --print-architecture) signed-by=/etc/apt/keyrings/docker.gpg] https://download.docker.com/linux/ubuntu $(lsb_release -cs) stable" | sudo tee /etc/apt/sources.list.d/docker.list > /dev/nullsudo apt-get update
sudo apt-get install docker-ce docker-ce-cli containerd.io docker-compose-plugin安装nvidia-container-toolkit
distribution=$(. /etc/os-release;echo $ID$VERSION_ID)curl -s -L https://nvidia.github.io/nvidia-docker/gpgkey | sudo apt-key add -curl -s -L https://nvidia.github.io/nvidia-docker/$distribution/nvidia-docker.list | sudo tee /etc/apt/sources.list.d/nvidia-docker.listsudo apt-get update && sudo apt-get install -y nvidia-container-toolkit
sudo systemctl restart docker设置用户组,消除 sudo 限制
sudo groupadd dockersudo gpasswd -a $USER docker- 注销账户并重新登录使新的用户组生效
- sudo service docker restart
2. 安装ROS-Noetic
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'sudo apt install curlcurl -s https://raw.githubusercontent.com/ros/rosdistro/master/ros.asc | sudo apt-key add -sudo apt updatesudo apt install ros-noetic-desktop-fullsudo apt install python3-catkin-tools
3. 使用模拟器
本机启动
cd /path/to/IntelligentUAVChampionshipSimulator- 模拟器:
wget https://sz-rm-rmua-dispatch-prod.oss-cn-shenzhen.aliyuncs.com/0e954d75cf7e0afdba0d2dea27a08295/simulator_12.0.0.3.zipunzip simulator_12.0.0.3.zip- 渲染模式
./run_simulator.sh 123- 后台模式
./run_simulator_offscreen.sh 123
注意:123 为随机种子参数,不同的种子对应不同的配置
- 使用ros查看主题
source /opt/ros/noetic/setup.bashrostopic list
Docker启动
cd /path/to/IntelligentUAVChampionshipSimulatordocker build -t simulator01 ../run_docker_simulator.sh 123
注意:Docker仅支持后台模式运行,启动脚本后第一个参数 123 是模拟器的随机种子,可根据需要修改- 使用ros查看主题
source /opt/ros/noetic/setup.bashrostopic list
ros数据交互
用于获取数据的可订阅的主题
- 前视相机
/airsim_node/drone_1/front_left/Scene
/airsim_node/drone_1/front_right/Scene- 后视相机
/airsim_node/drone_1/back_left/Scene
/airsim_node/drone_1/back_right/Scene- imu数据
/airsim_node/drone_1/imu/imu- 雷达数据
/airsim_node/drone_1/lidar- 无人机状态真值
/airsim_node/drone_1/debug/pose_gt- gps数据(含带误差姿态)
/airsim_node/drone_1/gps- 风速计
airsim_node/drone_1/debug/wind- 电机输入PWM信号(0:右前, 1:左后, 2:左前, 3:右后)
/airsim_node/drone_1/debug/rotor_pwm- 起始位姿
/airsim_node/initial_pose- 终点位置
/airsim_node/end_goal—- 用于发送指令的主题- 速度控制(0:x轴速度, 1:y轴速度, 2:z轴速度, 3:角速度,4:加速度(上限为8m/s2),5:是否急停(1表示急停))
/airsim_node/drone_1/vel_cmd_body_frame- PWM控制(0:右前, 1:左后, 2:左前, 3:右后)
/airsim_node/drone_1/rotor_pwm_cmd—- 可用服务- 工厂巡检数据上报
index:(0 每条路径的中央枢纽前工厂; 1 每条路径的中央枢纽后工厂) value:(仪表数值)
/airsim_node/meter_report
系统相关参数
无人机系统参数
- 质量 0.9kg
- 轴距(电机至机体中心)0.18米
- 转动惯量 Ixx 0.0046890742, Iyy 0.0069312, Izz 0.010421166
- 电机升力系数 0.000367717
- 电机反扭力系数 4.888486266072161e-06
最大转速 11079.03 转每分钟
标定板参数
- 行数(内点)8
- 列数(内点)11
- 方块边长 0.06 米
Q&A
速度控制描述
1.速度控制仅提供基础飞控,保证静止无风时可悬停,但限制最高加速度,并且出现大幅速度变化时会出现姿态波动,如需要更稳定的飞控,建议使用pwm控制
2.此处的加速度是标量,表示x轴与y轴速度变成预期速度(速度控制中输入的数值)的快慢,最高为8m/s2,超过8的数值按8进行处理, 示例:无人机初始速度为0,此时x轴速度输入为8,加速度输入为8,x轴速度会线性增加,1s后,x轴速度从0变为8m/s
3.速度控制的第五个参数,表示是否需要急停,当输入为1时,会忽略所有输入,速度瞬间归零进入悬停状态,但飞机会有姿态变化,急停前速度越快,急停时姿态变化越大
工厂巡检数据上报
工厂巡检数据上报服务输入参数index的0表示每条路径的中央枢纽前工厂,1表示每条路径的中央枢纽后工厂
示例:8-12路径,在中央枢纽前进入工厂后,输入index为0进行上报,中央枢纽后无需进入工厂巡检上报;12-10路径,在中央枢纽前进入工厂后,输入index为0进行上报,在中央枢纽后进入工厂后,输入index为1进行上报;
调试配置表
在模拟器路径下的 /Build/LinuxNoEditor/RMUA/Content/Configs/GameConfig.json 的json文件中有两个字段IgnoreAllHitCollision,IgnoreOverTime,第一个字段设置为true后,撞击不会导致比赛结束,第二个字段设置为true后,超时不会导致比赛结束。可酌情使用,便于调试。
找不到数据类型
开发速度控制ros通信所需的msg文件,可查阅VelCmdmsg文件夹
使用rqt_topic时发现一些数据类型缺失,可参考source官方开发案例教程中basic_dev中的airsim_ros包。具体请参考: https://github.com/RoboMaster/IntelligentUAVChampionshipBase/tree/RMUA2026
帧率波动
当帧率波动严重时,可以更换更高性能的显卡。
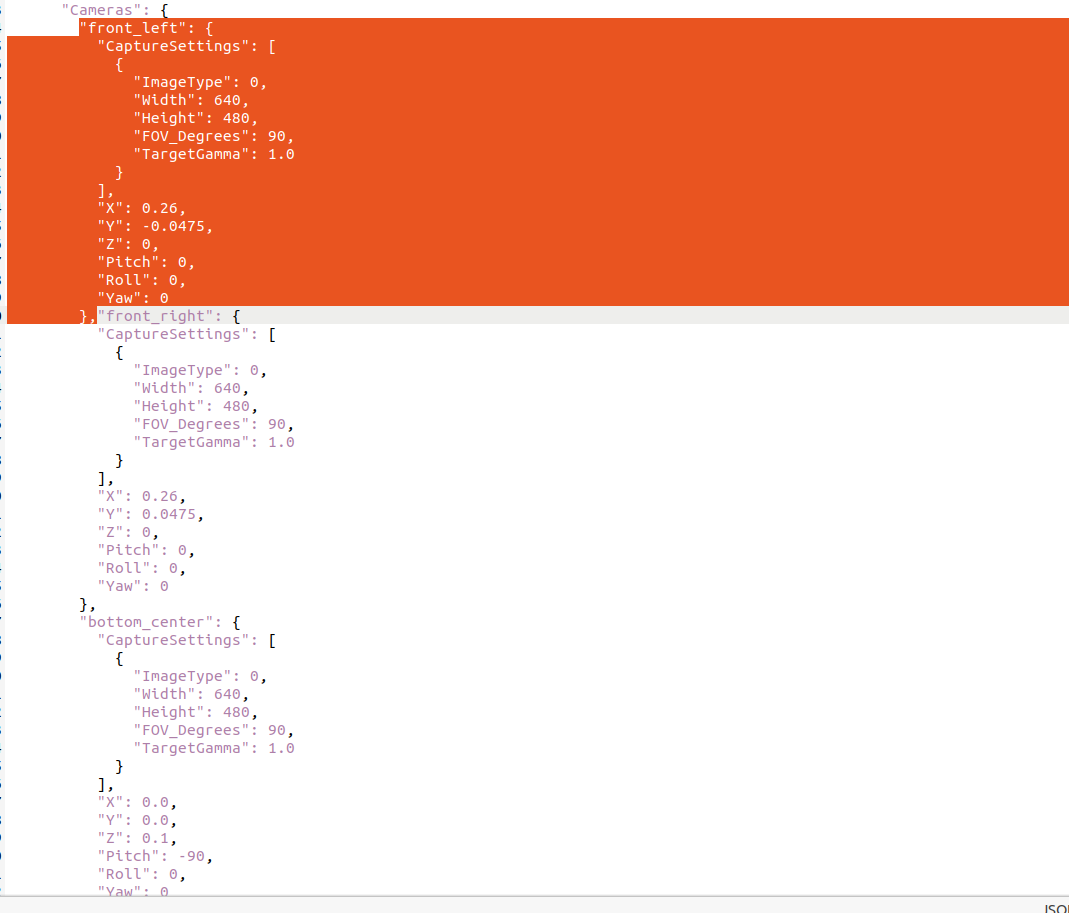
也可以关闭不需要的相机降低模拟器性能需求,提升帧率稳定性。 对于本机启动,仅需要把 /path/to/IntelligentUAVChampionshipSimulator 中的 settings.json 中相应相机配置删除即可关闭该相机。
对于docker启动,需要把 /path/to/IntelligentUAVChampionshipSimulator 中的 settings.json 中相应相机配置删除后重新构建镜像即可。
时钟同步
模拟器时钟与本地时钟存在一定差异,建议使用 IMU 主题传出的时间戳作为全局时钟进行程序设计。